SIAR is an autonomous ground robot able to autonomously navigate and inspect the sewage system with a minimal human intervention. To properly address the challenge, the following goals are guiding the SIAR development:
- robust IP67 robot frame designed to work in the hardest environmental conditions;
- increased power autonomy and flexible inspection capabilities;
- robust and increased communication capabilities;
- increased onboard autonomous navigation and inspection capabilities;
- usability and cost effectiveness of the developed solution.
Locomotion Platform
The SIAR robot is based in a six-wheeled differential kinematic configuration with an axle track width adjustment mechanism. Each wheel (260 mm offroad) is powered by an independent motor attached to a 90º gearbox and it is connected to the central robot frame through an independent suspension. The axle track mechanism increases the adaptability of the robot to the sewer configuration by mean of a change in the position of the wheels. This mechanism is actuated by a linear motor linked to the bottom of a central structural frame. The central structural frame is used to connect the motorized wheel traction system, the width adjustment mechanism and to carry the payload equipment and electronics.

Robot platform main features:
- Weight: 55 Kg
- Payload capability: 30 Kg
- Battery autonomy: up to 4 hours
- Maximum Velocity: 0.75 m/s
- Acceleration: 1 m/s2
- Emergency Stop Acceleration: 3,3 m/s2
- Dimensions with maximum width (Height x Max_Width x Length) : 44 x 70 x 84 cm
- Dimensions with minimum width (Height x Min_Width x Length) : 44 x 50 x 98 cm
Communications
Most of the current solutions for robotic sewer inspection make use of tethers and cables for communicating with a base station. This circumstance limits the places the robot can reach once deployed. In contrast, we use a wireless setup that offers communication with the base station during all the inspection procedure.
Our solution aims to solve this problem by means of deploying self-powered wireless repeaters where needed. These repeaters could be deployed either manually or by the robot itself by means of a robotic arm. In case of manual deployment, the operators do not need to enter the sewer but rather the communication devices can be easily fixed to the manhole cover, dramatically reducing the deploying time and human risks.
Our devices have been tested indoors and proved to communicate more than 300 meters with line of sight and more than 500 meters with the aid of repeaters. They provide a high bandwidth connection that will be used for robot commanding, video streaming and additional information such as 3D data that allows us to perform detailed 3D-reconstruction of the environment in real-time.
Navigation
The SIAR system philosophy is to let the robot solving the navigation so that the operator can focus in the inspection task, even if some sections of the sewer are difficult to navigate. An array RGB-D sensors installed onboard the robot (see perception section) provides almost fully environment awareness during the autonomous robot navigation tasks.
The navigation module combines and processes the information of the sensors enabling the robot to automatically navigate through the center of the sewer without falling into holes nor colliding with obstacles. In this way, the operator provides high-level commands such as moving forwards, backwards or stopping the robot when reaching an area of interest. Moreover the system is able to traverse the gutter when need, i. e., whenever a fork is found. The operator is allowed then to choose the new direction to follow. Next videos show the navigation capabilities of our platform.
Video Navigation 1
Video Navigation 2
Video Navigation 3
In order to safely navigate through the sewage system while following an inspection plan, the robot should be localized at any time. However, as the sewers are a GPS-denied area, this is not a trivial task. Fortunately, SIAR system is capable to self-localize in real-time with an absolute error below 1m thanks to the onboard sensors and given prior geometric information of the structure of the sewer, which can be provided by local authorities. Next video shows an example of the information the operator can receive in real time, which includes real-time image flow and geo-localization of the platform.
Perception
The SIAR platform is equipped with seven RGB-D camera sensors that enable metric 3D scanning of the environment at any moment. The robot also provides artificial illumination of the environment for visual inspection purposes. Notice that the 3D scanning system does not of any illumination. In addition, a full HD camera is installed in the end effector of the manipulator which is used for automatic deployment of communication repeaters and optionally a high-quality pan&tilt camera can be installed at the top of the robot.
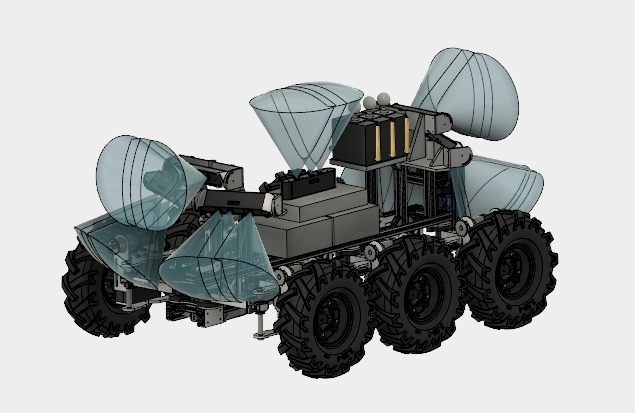
Figure: The robot carries an array of RGBD cameras.

Figure: The point clouds directly generated by the sensors. Left: general view (the robot is in the center, each square in the grid represents a 1 m side square). Right: close-up view.
The depth information of the RGBD cameras can be used to automatically detect inlets, manholes or structural defects on the sewers, given prior information about the section of the sewer gallery. Next figure and video represent an overlaid on the original images some candidate zones of defects are shown. On the left, some cracks on the floor and left wall can be seen. On the right, a deformation on the left wall is highlighted, as well as a hole on the right (an inlet).

Figure: Automatic detection of sewer elements and structural defects.